





Watson-AGVS小车中央调度系统
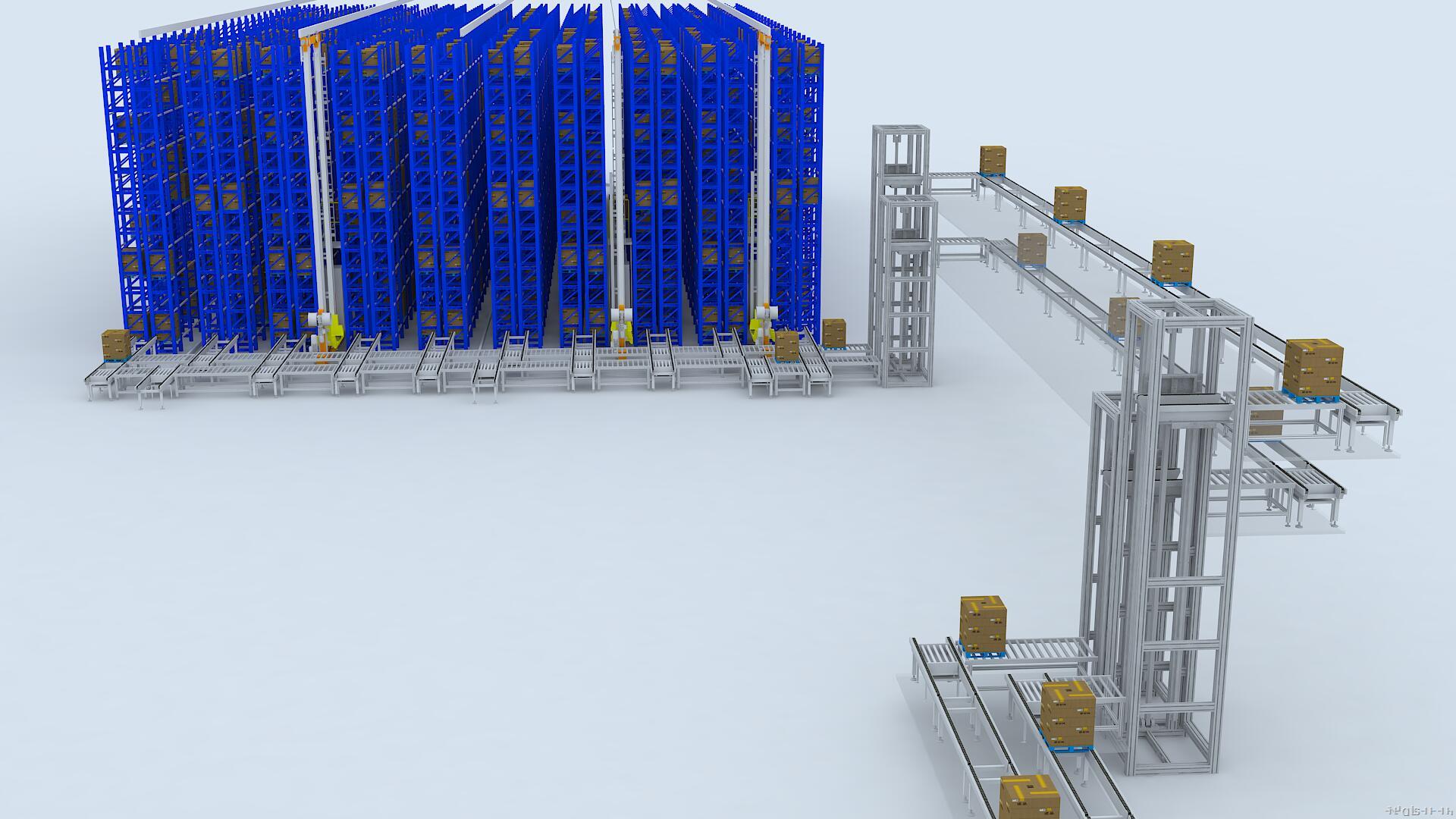
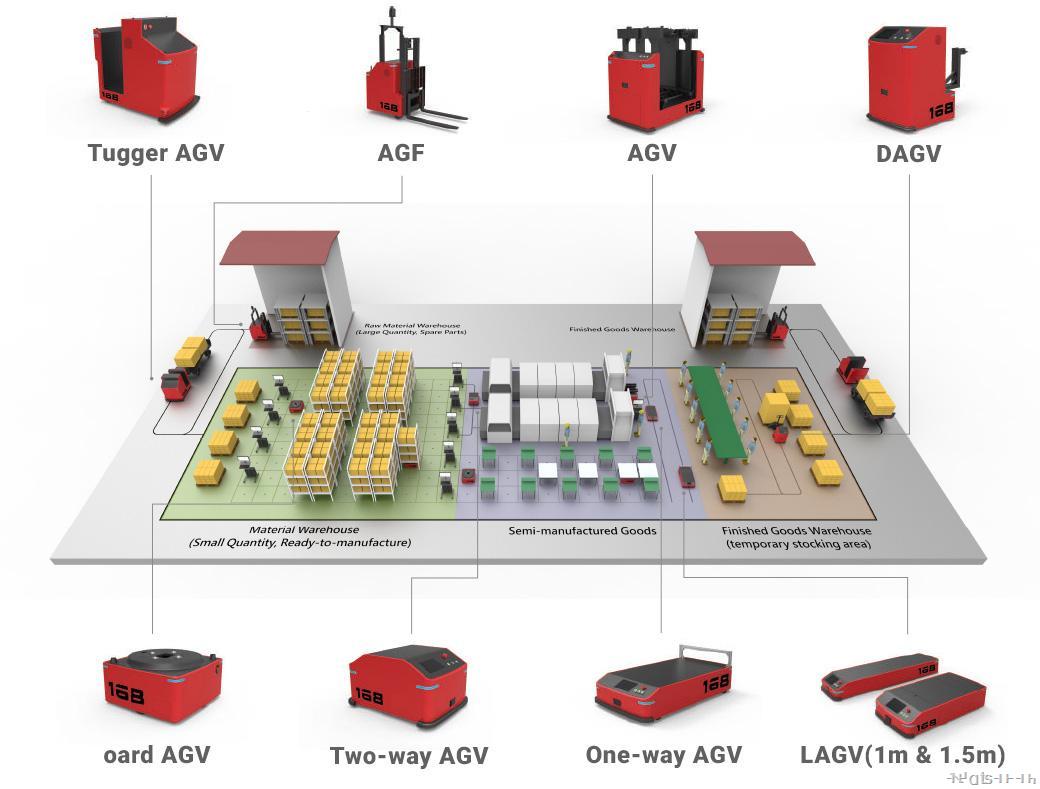
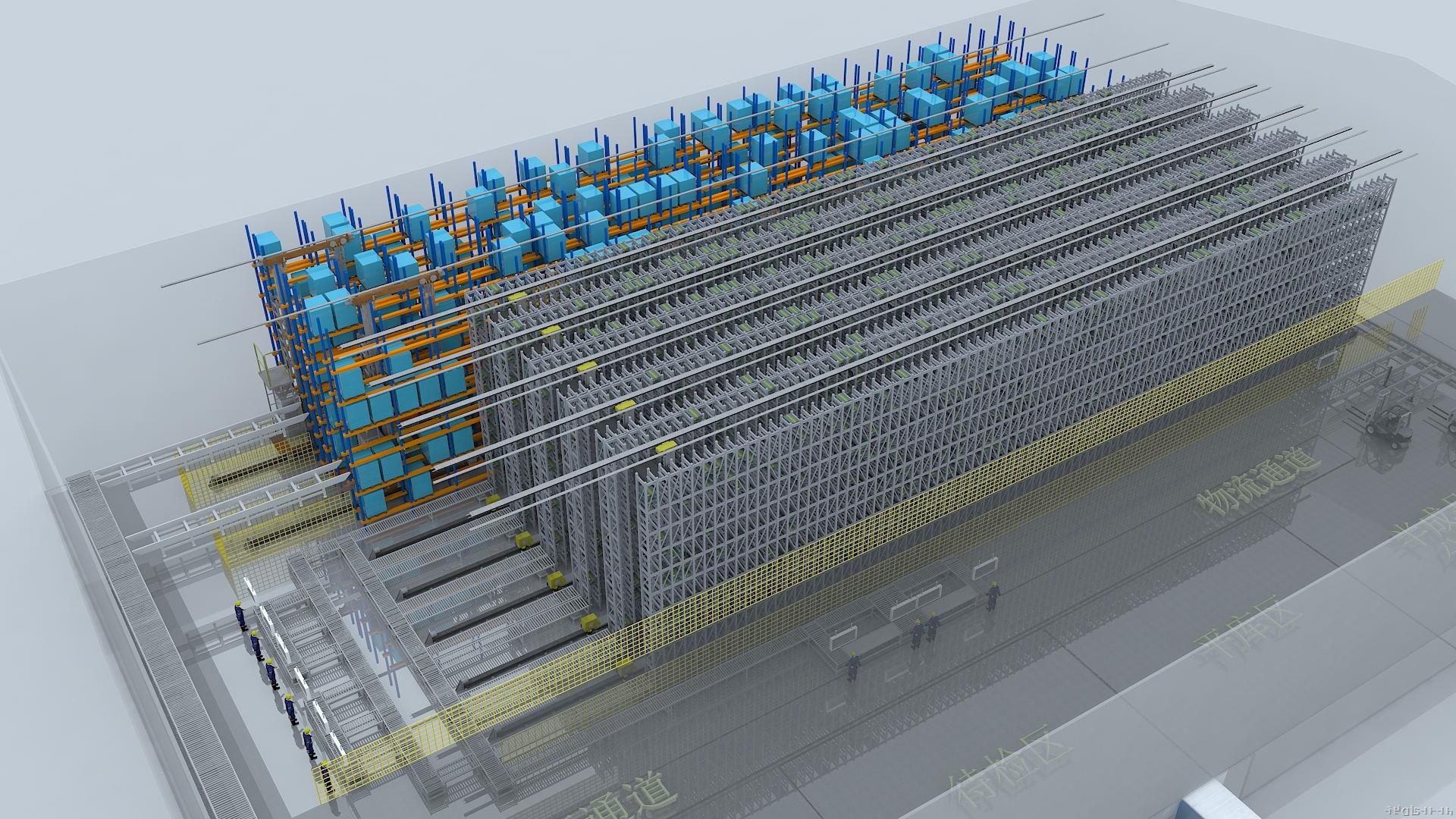
AGVS中央控制系统,是整个物料搬运系统的大脑,通过无线网络与AGV车辆实现数据交互。负责车辆的任务分配,路径规划,系统对接及实时监控,经过对现场的分析看,主要有以下的任务:
A、对AGV的电量进行检测,并安排AGV与充电站的相互通讯及充电工作;
B、基于AGV车辆管理、交通状态和运输指令,可实现高效的运输流优化;
C、实时收集现场的需求信息,灵活高效的配合产线生产和货物储运;
D、AGV运行日志的收集;
E、与MES(或者ERP、WMS等业务系统对接)对接,接受搬运任务,反馈任务执行情况;

● 通过计算选择到达取货点行走时间最短的车辆,而不是路程最短的车辆。
● 通过计算侦测路段中是否有车辆作业来避让拥堵的路段。
● 引入弯道参数,尽量选择直道。


● 全动态实时显示AGV系统中各台AGV小车的工作位置及运行状态,常用的状态包括正常状态、等待充电、充电需求、手动状态、急停状态、路径堵塞、小车丢失、小车停止等。并显示各作业点、充电点的占用信息。
● 报告AGV系统出现的各种故障,产生事件日志等报表。
● 可根据要求缩放监控界面图形。
● 查看和设置数据采集系统的输入和输出状态。
● 查看任务命令缓冲区中的任务命令列表,查看AGV小车具体的装、卸地点。任务命令列表会根据收到的状态信息不断更新,可根据要求删除某一项任务命令或改变任务的某些参数。
● 查看AGV小车的车载控制器的状态,跟踪指定的AGV小车,取消不在系统中的AGV小车,释放多台AGV小车之间的堵塞。
● 系统具有事件管理功能。可报告各类异常事件,包括AGV小车等待充电时间过长。车辆阻塞时间过长;任务被取消;装、卸货站台号无效或错误等。可利用事件过滤器,只显示所需查询的事件类型或时间段内发生的事件。
● 特殊情况下可通过图形监控界面直接下达任务。
上一篇:无
下一篇:无
