随着互联网经济的快速发展,现代物流技术日新月异,物流生产作业设备快速发展,装备水平大幅提升,穿梭车作为物流系统中常见的搬运输送设备,广泛应用于物流系统中。
环形穿梭车由直线往复式穿梭车发展而来,因直线穿梭车在运动过程中需要间歇停顿以防止碰撞,限制了其搬运速度,降低了穿梭车的工作效率 。环形穿梭车轨道在平面内呈闭环布置,穿梭车沿轨道单向运行,可以同时运行多台穿梭车,实现多站台作业,从而改善了往复式穿梭车输送能力有限的缺点。①穿梭车采用双轨道运行,在较小转弯半径条件下也能流畅运行,行走和货物输送均采用变频器控制,可实现无极调速;②采用条码定位技术,简化了位置及速度控制,系统的可维护性大为改善,增加车辆或站台也非常简单;
③环形穿梭车集成了计算机调度管理系统、可编程控制技术,可调度所有穿梭车协调运行,基于无线以太网通信系统可实时显示穿梭车的运行状态,如接货、送货、行走位置等。
该物流配送中心出库环节主要包括立库、环形穿梭车、自动拆垛机械手、备货库和监控系统等。监控系统负责各类设备的调度,使得各项业务能够规范有序且高效地进行,并对各种设备的运行情况进行实时监控。货物以托盘为载体,按固定的数量和堆码方式存储在立库中,当备货库货物数量低于设定的临界值时向监控系统发出要货请求,监控系统根据货物存放的位置、数量等信息,生成出库任务并下发给相关设备。堆垛机根据任务信息将货物叉取到立库出口,然后监控系统调度环形穿梭车,将货物运输到对应的机
图1 主要流程
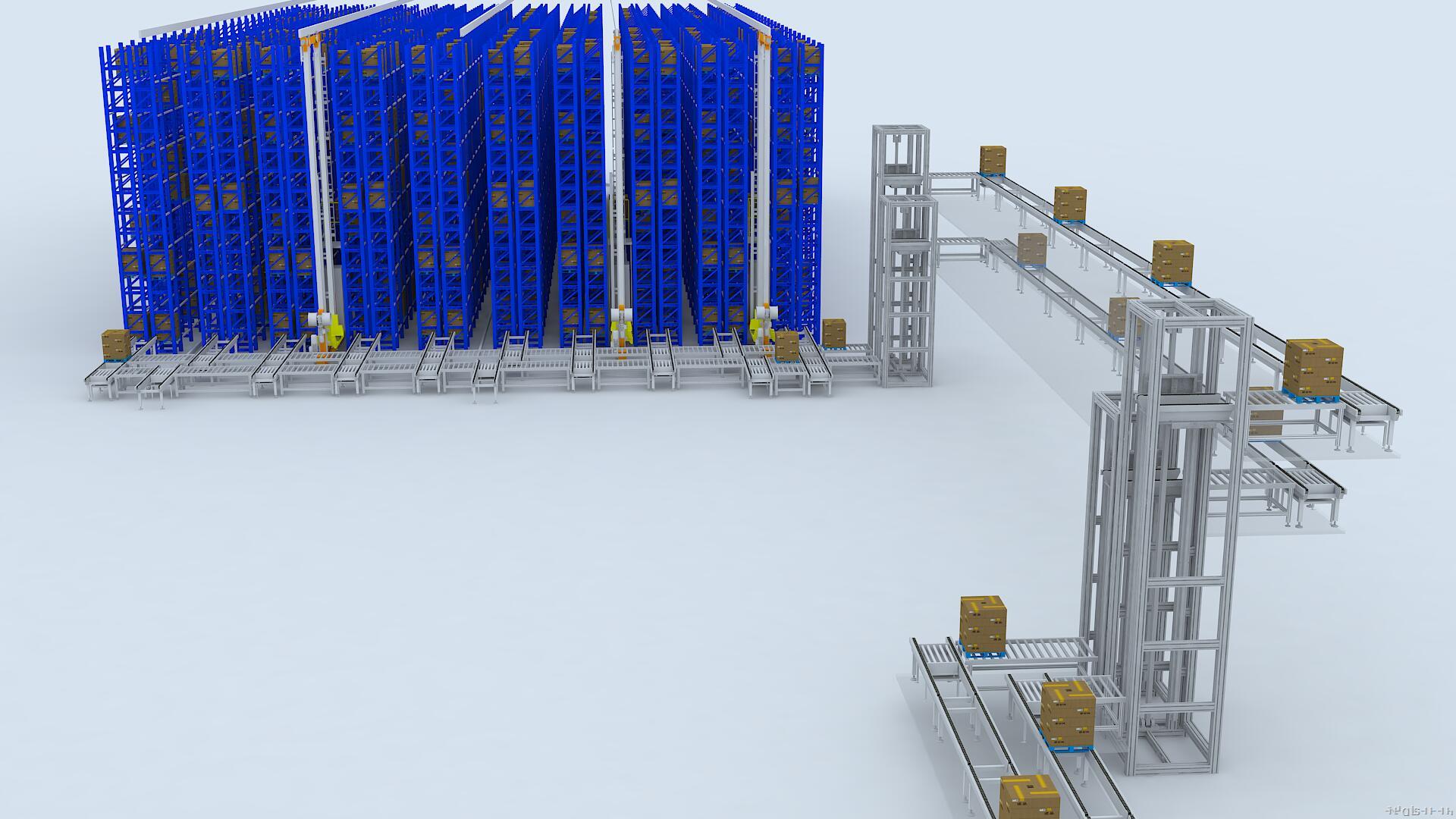
该物流配送中心立库设置有18列货架,每列货架对应一个出口,即立库有 18个货物出口(图2)。一台自动拆垛机械手有左、右2个拆垛工位、4台机械手共有8个拆垛工位,每个拆垛工位可以暂存2盘货物。立库出口与机械手拆垛工位不存在固定的一一对应关系,而是多对多的关系,每个出口的货物都可能被运输到8个拆垛工位的任何一个工位,属于多站台货物运输。
图2 出库环节设备布局
为满足多站台货物运输的需要,基于双轨道环形穿梭车的特点,在立库出口和拆垛工位之间设置了一套双轨道环形穿梭车运输系统,穿梭车驱动单元采用变频调速,具有起动性能好、调速范围宽、速度变化平滑、运行稳定,同时有完善的过压、过流保护功能。环形穿梭车空载运行速度为1.5 m/s,荷载运行速度为1m/s,沿轨道顺时针方向单向运行,单台环形穿梭车的设备运输能力为30盘/h,整个出库环节最大出库效率需求为117盘/h,因此在环形穿梭车运输系统中设置了4台穿梭车、理论出库效率为120盘/h,满足货物出库的效率要求。穿梭车由监控系统负责调度,在没有货物运输任务的情况下穿梭车处于空闲状态,在轨道起点位置排队等待调度,轨道起点位于立库1号出口左边;当有货物在立库出口需要运输时,监控系统根据设定的调度策略、安排穿梭车运输任务。监控系统将货物的任务信息写人穿梭车,任务信息包括任务流水号、任务生成时间、货物类别、货物数量、立库出口号、拆垛工位号等,接到运输任务后,环形穿梭车控制系统自动解读任务信息,并完成货物的运输。当出口的货物调度穿梭车运输后,该货物标记为已调度.已调度的穿梭车在完成运输任务前不能再次被调度。该物流配送中心在前期运行中,监控系统采用距离优先策略调度环形穿梭车。所谓距离优先策略,就是当多个立库出口有待运输的货物、监控系统比较货物所在出口与穿梭车起点位置的距离远近,距离近的货物优先安排穿梭车运输。如图2所示。立库1号出口距穿梭车起点的位置最近,18号出口距穿梭车起点的位置最远,即立库出口的编号值越大,到穿梭车起点的距离越远。监控系统在调度时,只需要比较货物出口编号的值大小。就能很快完成调度任务。距离优先的环形穿梭车调度策略使用简单,控制方便,易于实施,适用于出库量不大,出库时间比较分散的场合。由于该物流中心出库量大,出库时间比较集中,应用距离优先策略调度穿梭车时、穿梭车总是优先运输编号较小的出口的货物,存在以下3个问题:①补货的及时性不够,由于急需的货物出口距离较远,得不到及时运输,导致生产中断;②容易出现穿梭车堵塞轨道的情况,在某工位货物已满的情况下,穿梭车运输到该工位的货物无法卸货,只有停止在轨道上等待,导致轨道上的穿梭车堵塞;③设备利用率不够高,因缺货和穿梭车堵塞,导致原本有拆垛任务的机械手无货可拆,机械手被迫处于空闲状态,降低了机械手的利用率,堵塞同时也会降低环形穿梭车利用率,不能体现出环形穿梭车的优势。针对距离优先策略在实际运行过程中出现的问题,逐一进行了分析,主要有两方面的原因:(1)没有考虑货物运输的紧急程度。在大量货物同时出库的情况下,编号值小的立库出口连续不断有货物出来,距离优先策略单纯按距离远近安排运输任务,忽略了对所需货物紧急性的影响,不能满足出库峰值期间的货物运输需要。(2)没有考虑机械手拆垛工位的忙闲状态。因每个拆垛工位只能暂存2盘货物,在拆垛工位已有2盘货物的情况下,运输到该工位的货物只能在轨道上等待卸货,造成轨道上环形穿梭车堵塞。根据对距离优先调度策略存在问题的原因分析,使用一种带有约束条件的排序调度策略,对穿梭车调度策略进行优化。即在调度时先对拆垛工位的忙闲状态进行判断,避免出现穿梭车在轨道堵塞的情况,然后对符合条件的任务按紧急程度进行排序,优先搬运急需的货物。(1)当有货物需要调度环形穿梭车运输,且有处于空闲状态下的穿梭车时;监控系统查询所有待出库的任务。即根据备货库的要货请求,已经生成出库任务,但该任务还没有调度穿梭车运输,得到一个待出库任务集合A。约束条件有两个,一是该任务的货物已经到达立库出口位置,二是该任务的货物要去的拆垛工位有空闲工位,能够接纳货物托盘。同时满足两个约束条件的任务留下,得到待运输任务集合B。在任务信息中,可以根据要货时间来判断所需货物的紧急程序,要货时间越早对货物的需求越紧急,因此对所有待运输任务按要货时间先后进行排序,得到排序后的任务集合C。(4)监控系统按照集合C中任务的先后顺序调度穿梭车。经过实践,优化后的调度策略有效避免了拆垛机械手因补货不及时造成的设备空闲,提高了机械手的利用率,同时也没有再发生穿梭车因待卸货在轨道上堵塞的情况,提高了穿梭车的利用率,从而提高补货到备货库的及时性,避免因补货不及时造成生产中断的情况。

环形穿梭车在货物输送方面的优势比较明显,在物流行业的应用逐渐增多。针对穿梭车使用过程中出现补货不及时、穿梭车堵塞等问题,本文分析了问题产生的原因,有针对性地对环形穿梭车调度策略进行了优化,从只关注立库出口与穿梭车起点的距离,转变到综合考虑货物出库任务信息的各方面,在实际应用中取得良好效果,提高了出库效率,满足了生产需要。